The article discusses designing a servo motor angle controller using the IC NE555. The servo motor used here for an experiment is an 11-gram micro servo motor with the following specifications.
- Rotational range 160o
- Operating voltage 8 – 6 V
- Operating speed 500 deg/sec @ 4.8 V or 600 deg/sec @ 6V
- Stall torque 8 KG/CM OR 2.4 KG/CM
- Pulse width 550 us (0o) to 2.2 ms (160o)
- Pulse repetition frequency (PRF) 50 Hz
The servo motor always has three terminals, one for +Ve voltage, another for –Ve voltage, and the third one for PWM input signal. Also, these three terminals are color-coded. In most motors, the red wire is for +Ve voltage input, the brown or orange wire is for –Ve voltage input and the yellow or green wire is for PWM signal input.
The motor is given supply through +Ve and –Ve wires by connecting +Ve wire with 5 to 6 V and –Ve wire with ground. PWM input is the actual signal that rotates the motor at the exact angle. As the width of the input pulse is varied from 500 us to 2200 us (2.2 ms), the motor rotates from 0o to 160o. Also, the pulse has to be applied at a rate of 50 Hz, that is, after every 20 ms. As a pulse width continuously increases from 500 us to 2200 us, the motor angle increases from 0o to 160o and vice versa.
But as we know, the IC NE555 is also widely used for generating PWM signals. So, to accurately control the servo motor angle and rotate it to an exact angle, it is required to apply a precise PWM signal, which is possible with a microcontroller. Here we illustrate how a simple servo motor angle controller can be built using the IC NE555.
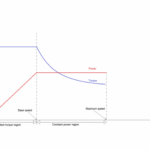
The IC NE555 has to be configured in astable mode to generate continuous pulses, and also, its ON time must be significantly less compared to OFF time. See the figure given below to understand it better.
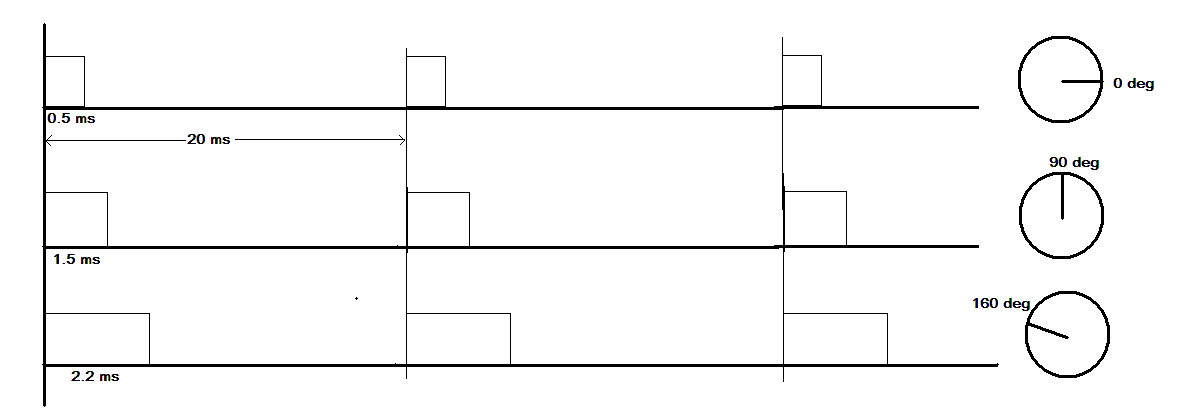
To generate such a waveform, we need the following astable configuration of the IC NE555.
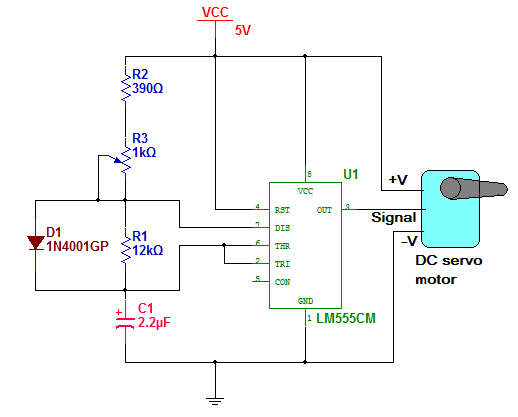
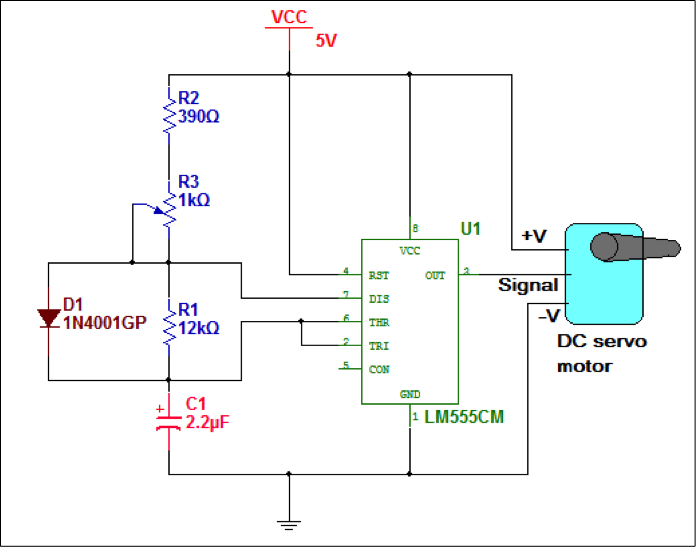
Circuit diagram
The figure shows that the IC NE555 is connected in astable mode with resistors R1, R2, and capacitor C1. There is an addition of a diode connected across R1 between terminals 7 and 6, bypassing R1 during the charging of C1. The chip’s output is connected to the PWM signal input of the servo motor. The circuit is given supply from 5 V.
Circuit design
In this circuit value of R1 and C1 is fixed, but the value of R2 has to be variable to vary the width of the pulse. So to design the circuit to generate the required PWM wave, we have to find out the values of R1, R2, and C1. So let us start.
Ttotal = TON -TOFF
TOFF = Ttotal -TON
= 20 – 2.2
= 17.8
≈ 18 ms
Now, the equation for Toff is
TOFF = 0.69×R1×C1
Let us assume C1 as 2.2 uF. Substituting values
18×10-3 = 0.69×R1×2.2×10-6
This will give us R1 as
R1 = 11.85 KΩ
So, take R1 as 12 KΩ. This gives us two values for circuit design
R1 = 12 KΩ and C1 = 2.2 uF
Minimum ON time is 550 us. It is minimum when R2 is minimum. The ON time equation is same
TON = 0.69×R2min×C1
We know values of TON and C1 so,
550×10-6 = 0.69×R2min×2.2×10-6
This gives R2min as R2min = 362Ω
The nearest actual value of R2 is 390 Ω. So R2 can be 390 Ω.
Now, go for maximum ON time that is 2200 us. Obviously it will be when R2 is maximum.
So,TON = 0.69×R2max×C12200×10-6 = 0.69×R2max×2.2×10-6
This gives R2max as
R2max = 1450Ω = 1.4 K ≈ 1K + 390 Ω
So if we choose R2 as one fixed resistance of 390 Ω and one pot of 1 K Ω then the circuit design may be perfect.
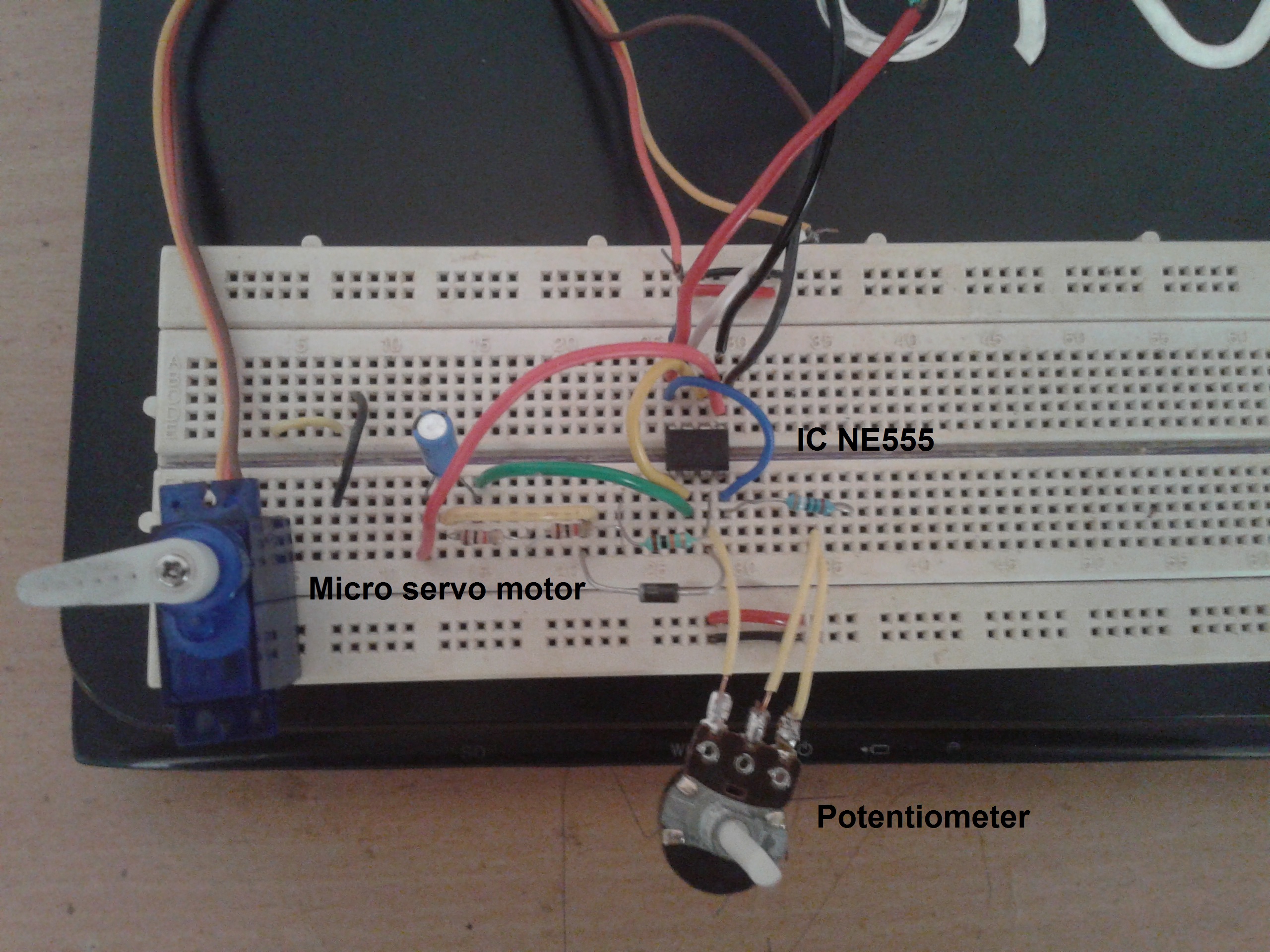
Here is the snap of the circuit built on the breadboard
Circuit operation
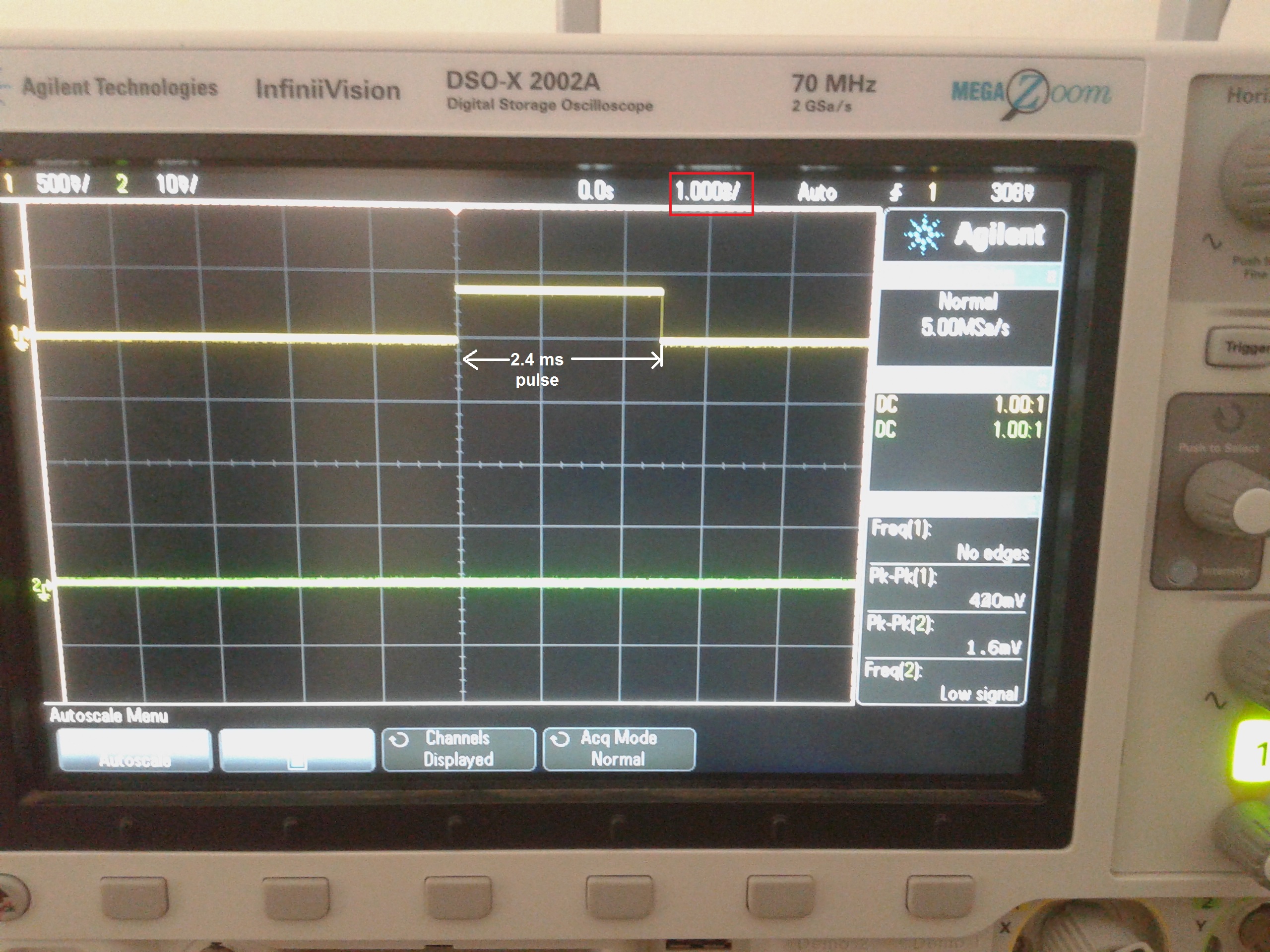
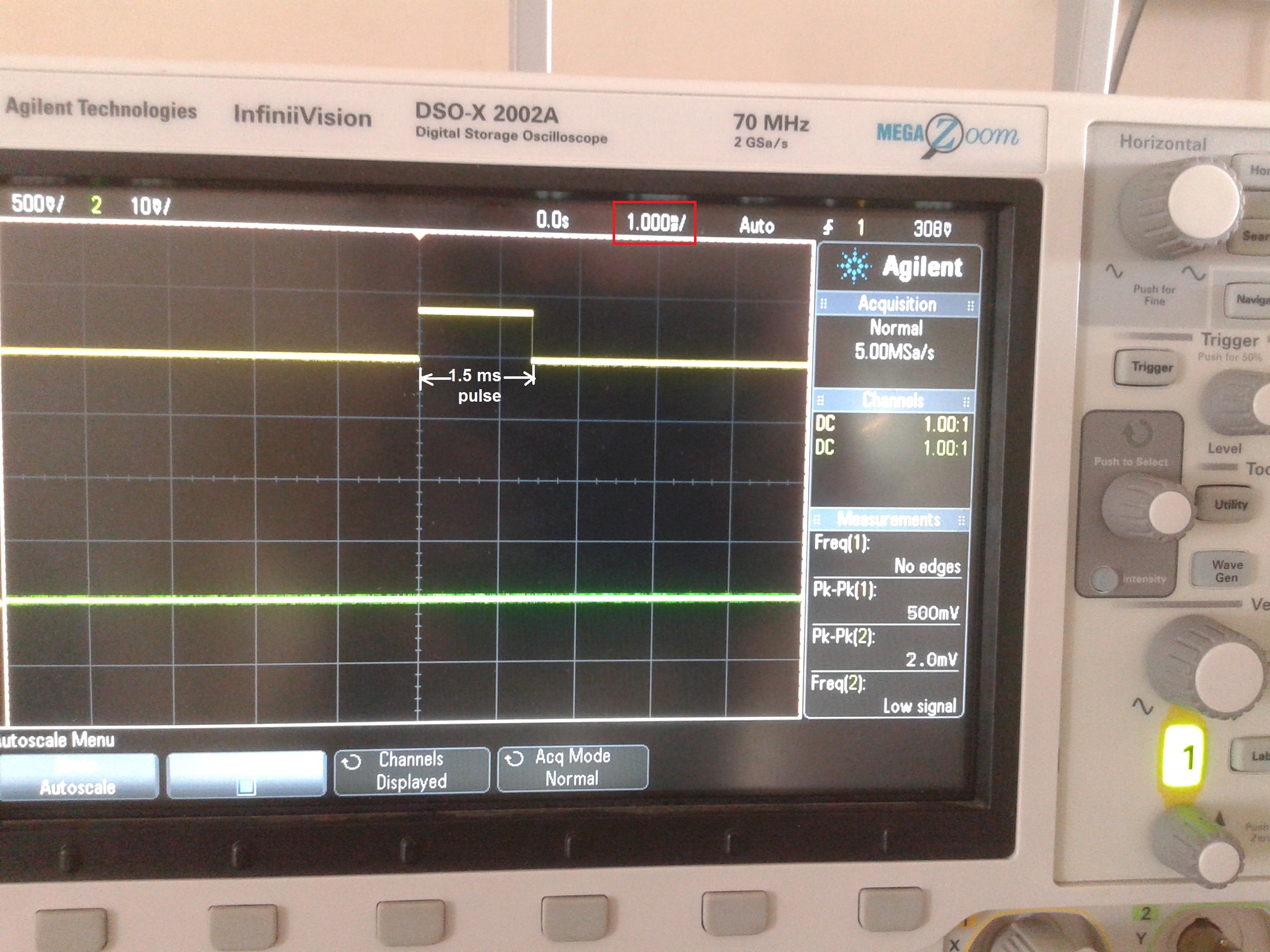
When the circuit is given a 5V supply, it generates a PWM wave at 50 Hz. When this wave is given to the servo motor, it will rotate at a specific angle. As the pulse width increases, the motor angle increases and vice versa. Here are some of the snaps of circuit output on the DSO.
You may also like:




Filed Under: Electronic Projects
Questions related to this article?
👉Ask and discuss on Electro-Tech-Online.com and EDAboard.com forums.
Tell Us What You Think!!
You must be logged in to post a comment.